
The Industrial Challenge:Manual sanding is inconsistent, dangerous for operators (dust/vibrations), and creates bottlenecks. In this project, the goal was to automate the finishing of mixed-production parts (flat, curved, and complex doors) with zero changeover time.
My Solution:I engineered a flexible robotic cell capable of adaptive sanding. By leveraging CAD-to-Path technology, I eliminated hours of manual point teaching, allowing the robot to generate complex trajectories directly from 3D models.
Key Results:

The Strategy: To prevent the classic "Robot crashes into fixture on startup" scenario, I created a Space Check Protocol.

The Risk: A rotary table (Turntable) carries high inertia. If an operator hits E-STOP during rotation, the system loses its state, leading to crashes upon restart.
The Fix: I implemented a Memory Logic Buffer (BG Logic). The system tracks the exact vector of the last movement even during a power cut. When power returns, the robot resumes exactly where it left off, preventing damage to the part or the fixture.

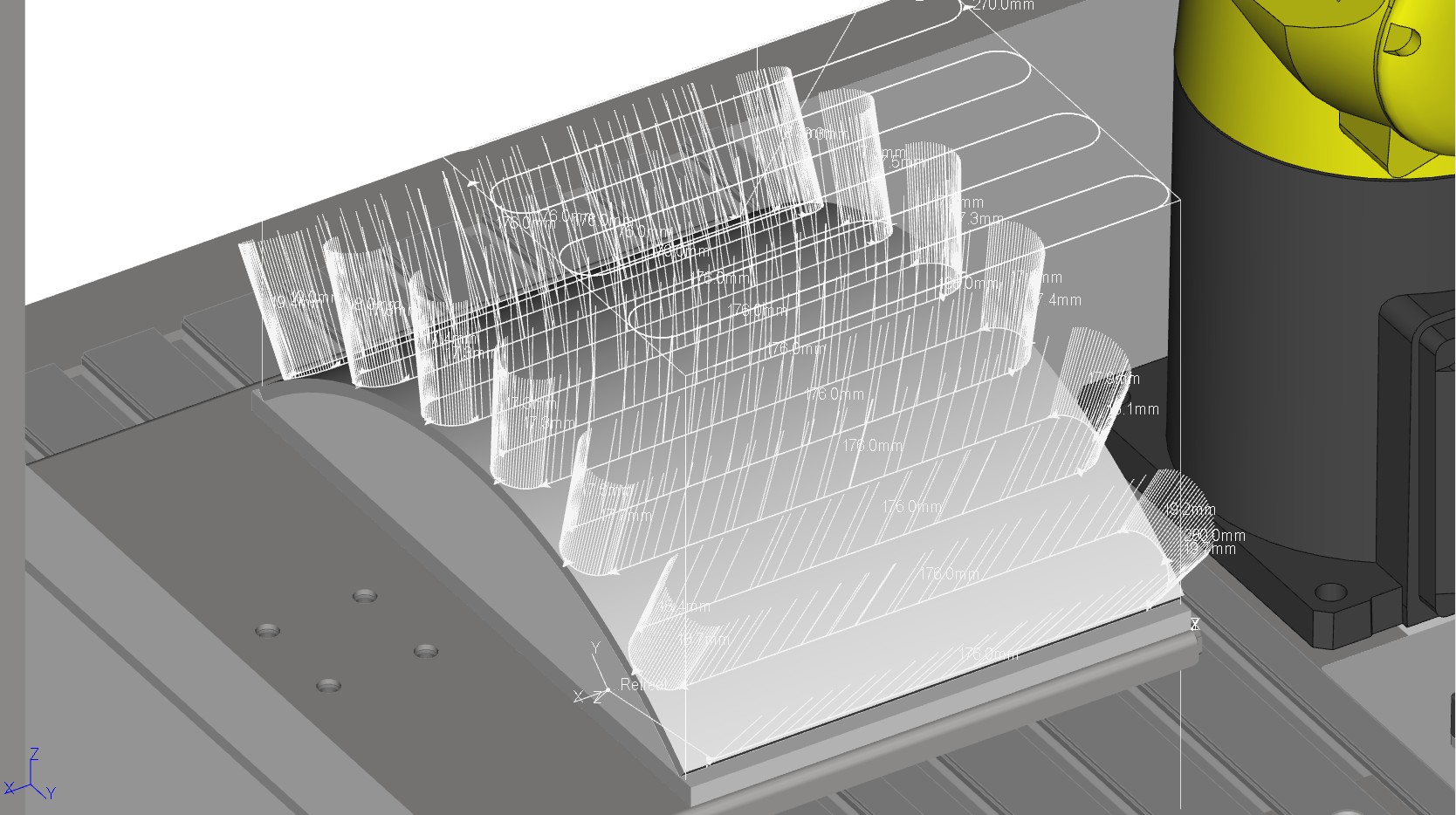
The Problem: Teaching thousands of points for a curved door takes days and is prone to human error.
The Fix: I utilized CAD-to-Path to convert 3D vectors into robot motion instantly. This transforms "programming" into "configuring", reducing the integration time for new products by 90%.
Business Value: Rapid prototyping and immediate switch to production for custom lots.



.svg)
.svg)